
Someone suggested that I write a little bit about my background in Robotics and the fact that I did a PhD in Robotics (Department of Electrical Engineering and Applied Physics). My thesis involved the emulation of basic animal behavior such as reflexes and fixed action patterns, as well as tree-search based artificial intelligence. I used neural networks in other contexts, but not for my PhD research. It also involved quite a bit of non-linear robot system control and the study of chaotic systems. I implemented my research on many kinds of robots but the robot I used the most was the 7-degrees of freedom Robotics Research Corporation Robot pictured below.
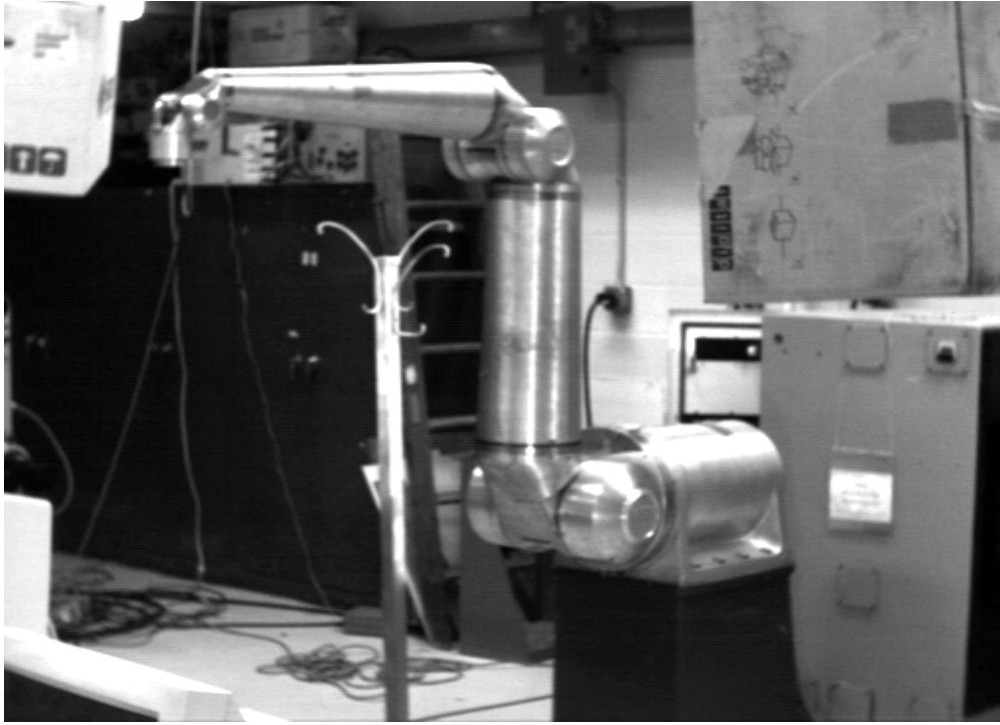
It looks messy in the picture, and I should probably explain. I had hung a few boxes from the ceiling and placed a coatrack in front of the robot. There is also another robot just outside the picture to the left. I placed a sonar sensor, or perhaps more correctly eco-location equipment on the tip of the robot. I used the sonar/eco-location to create a 3D map of the robot’s surroundings. Since the sonar-sensor could not see everything at once I used the arm of the robot to search and investigate the surroundings, including discovering that the boxes were open on one side. The motion of the robot was guided by the sonar and was not directly programmed by me. The robot was able to avoid colliding with the objects, including the other robot as it was moving. I moved objects around and added clothes and hats to the coatrack to make it harder. It looked like an animal figuring out what was around it. This was in 1993.
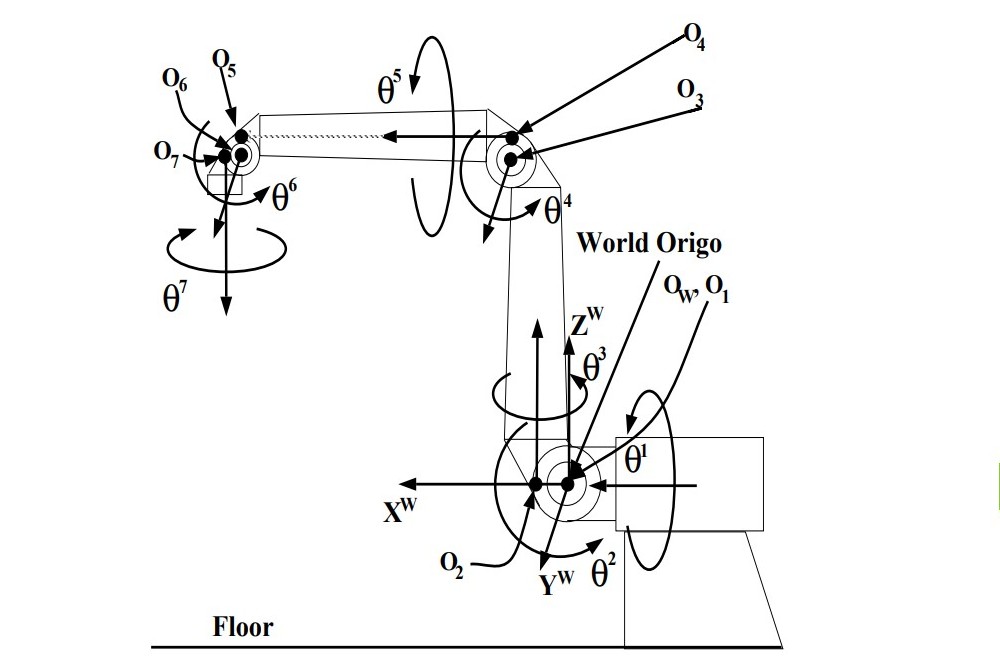
Maybe I should explain what 7-degrees of freedom mean. One degree of freedom could be a rotation (around a joint) or a translation. To arbitrarily position an object in space you need at least three degrees of freedom. To arbitrarily orient an object in space you need an additional three degrees of freedom. So, to arbitrarily position and orient a tool in space you need at least six degrees of freedom. Industrial robots frequently have six degrees of freedom. However, if you also want the robot arm to avoid collisions with objects in its space you need an additional degree of freedom. That’s why I needed a 7-degrees of freedom robot.
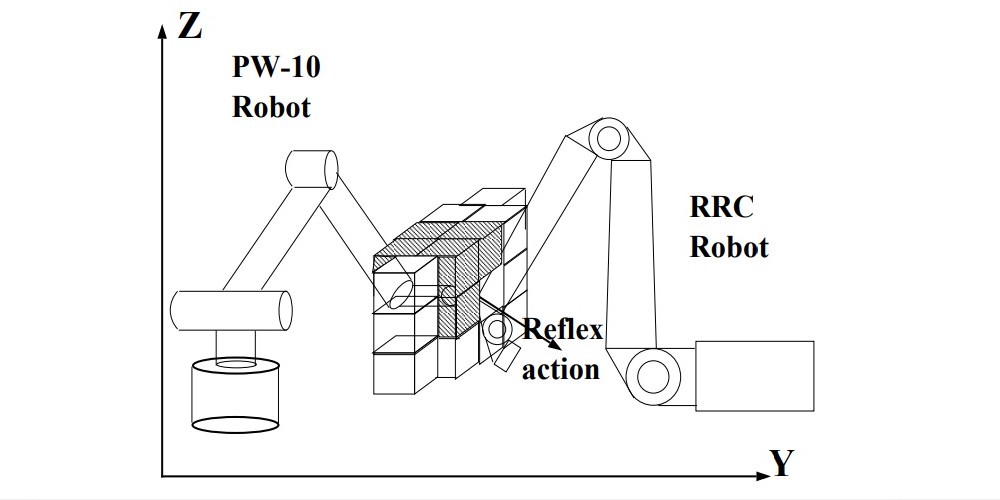
In the picture below an arc welding robot PW-10 is moving around unaware of its surroundings. The RRC robot detects that the PW-10 is in its space and perhaps approaching and quickly gets out of the way. Reflex control in action.
Robotics can be Math heavy (Algebra, Trigonometry, Calculus)
Part of the job of creating the control system is to create the kinematics, dynamics, and perhaps inverse kinematics, for the robot, and this is math heavy. Lots of algebra, calculus and trigonometry. I have included the Jacobian matrixes for the first four degrees of freedom for the RRC robot below. Just to illustrate how math heavy it is, and this is just four degrees of freedom. Note, doing this was not part of my research. It was just a basic mandatory task to get the robot to move predictably before you even get started.
I should say that as soon as I finished my PhD, I was offered a job at JPL in Los Angeles to work on an 11-degree of freedom robot that was supposed to be on the International Space Station. However, the government cut the funding for the project, so I never got to do it. Instead, I took a job with ABB Robotics. I did not get to do the math for the 11-degree robot but one of my first tasks at ABB Robotics in Wisconsin was to create the kinematic matrixes for more than 20 ABB robots.
Algebra is indeed a good skill in many professions. A lot of engineers, scientists, mathematicians, IT professionals use algebra in their work, and algebra teaches you how to think logically and methodically. Therefore, schools should teach it. Which is why I don’t find this common joke funny “Another Day Has Passed And I Didn’t Use Algebra Once”. I don’t find “Another Day Has Passed And I Didn’t Play An Musical Instrument Once” funny either but somehow I think the problem with the joke is more obvious to some people in the latter case.
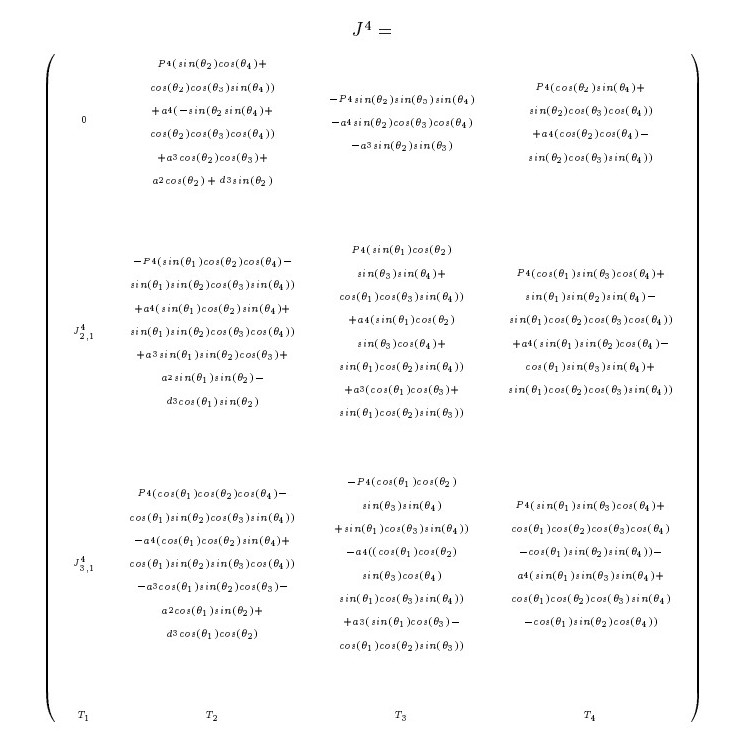
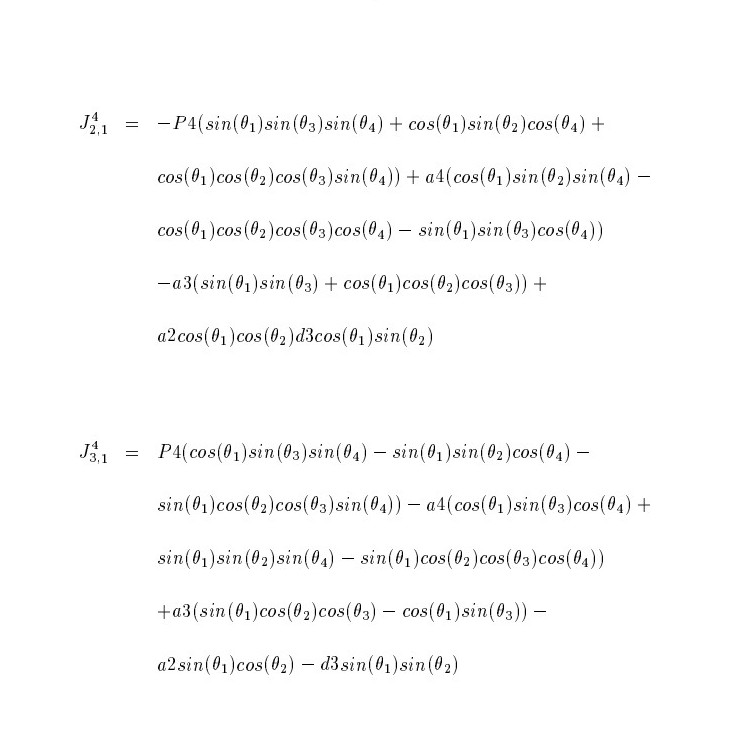
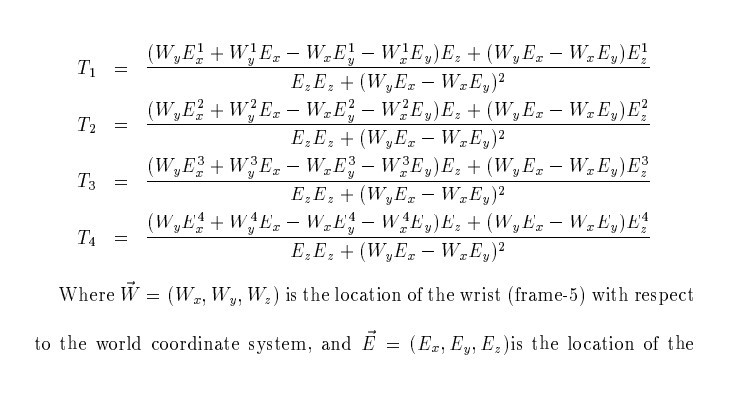
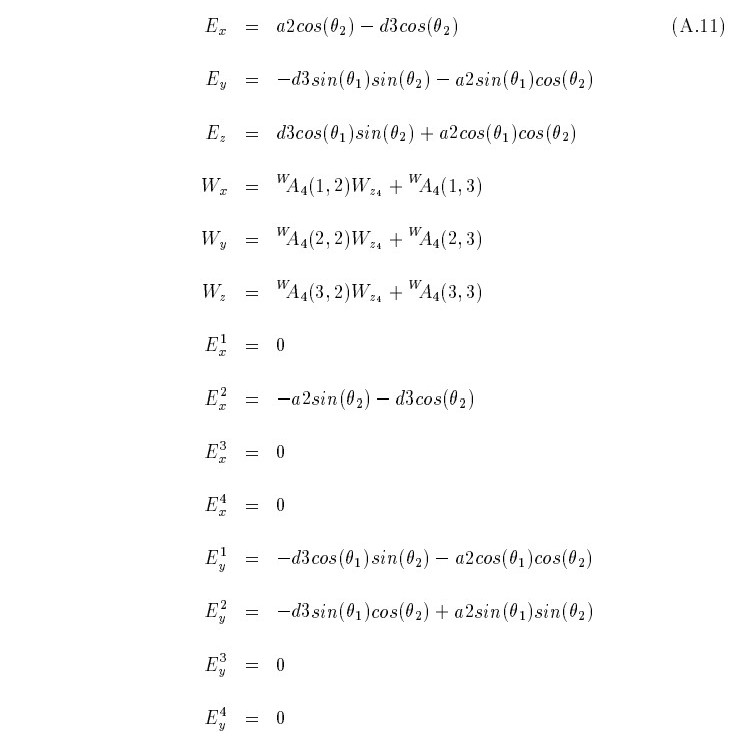
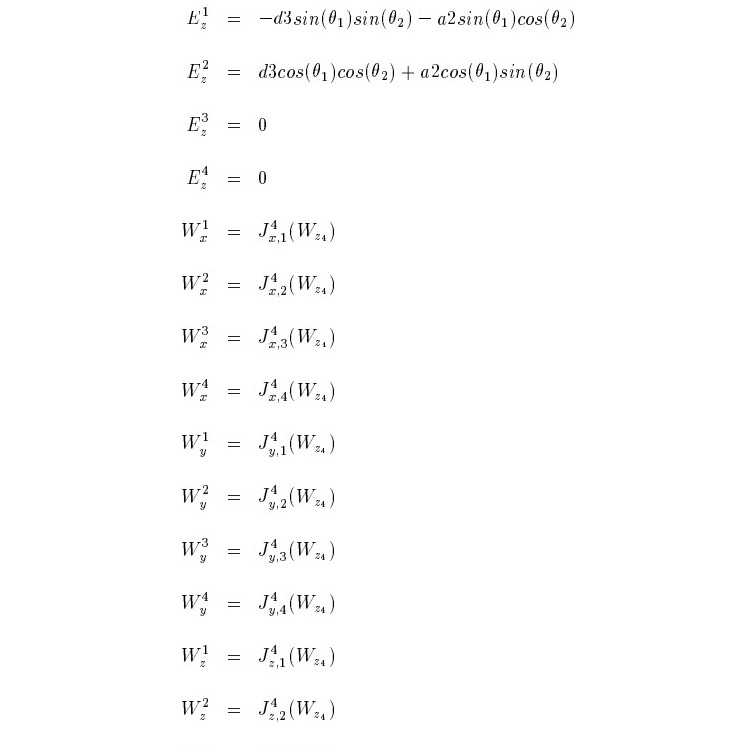
Note, not all factors are explained or shown so to see the complete equation you have to open the link in the first paragraph.
